



描述
PROFIenergy 可用來通過 PROFINET 網(wǎng)絡控制能耗。為此要使用讓負載對計劃內和計劃外中斷作出反應的命令。
ROFIenergy 是基于 PROFINET 的數(shù)據(jù)接口,用于統(tǒng)一關閉用電設備,并在暫停期間進行充分協(xié)調,而與制造商或設備類型無關。這樣,應確保僅為過程中的設備提供真正所需的電力。過程將節(jié)約大部分能量,而 PROFINET 設備本身僅具有較小的節(jié)能潛力。

IO 控制器的 PROFIenergy 指令:
需要兩條指令控制和監(jiān)視 PROFIenergy 功能。
通過 PE_START_END 指令,可以輕松地激活和取消激活 PROFINET 設備的閑置狀態(tài)。這可通過到達沿或離開沿實現(xiàn)。PE_START_END 指令提供實現(xiàn) PROFIenergy 命令Start_Pause 和 End_Pause 的簡單接口。通過 PE_CMD 指令,可以傳送所有 PROFIenergy 命令,包括 Start_Pause 和 End_Pause。可以使用其它命令,在暫停期間查詢 PROFINET 設備的當前狀態(tài)或行為。通過 PE_CMD 指令,可以快速便捷地處理所有 PROFIenergy 功能。
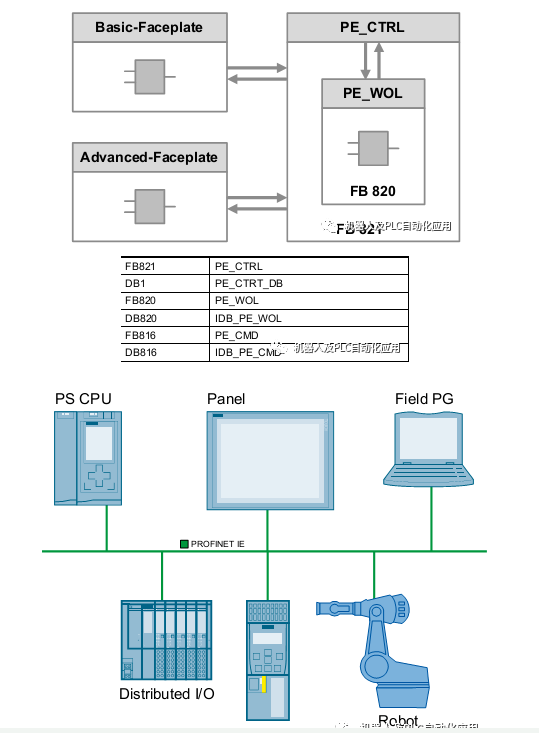
FB PE_WOL (FB820)
由于FB PE_WOL不具有多實例功能,因此將調用它,包括背景數(shù)據(jù)塊DB 820 IDB_PE_WOL。
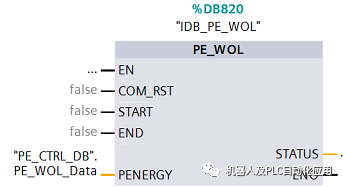
使用PE_WOL可以使用PROFIenergy尋址多達256個PROFINET設備。在用于初始化塊的信號之后,將讀取在PROFINET線上連接的所有設備的完整I&M數(shù)據(jù)。然后,將這些數(shù)據(jù)保存在PLC數(shù)據(jù)類型PE_PLUS“ PENERGY”的實例中,并提供給用戶(此處為FB PE_CTRL)。
此外,還要檢查每個設備的PROFIenergy功能。在下面的操作中,僅尋址支持PROFIenergy備用管理的設備(即可以在暫停期間通過PROFIenergy關機)。
這也包括支持LAN喚醒(WOL)模式的PROFIenergy設備。對于暫停結束命令,將所謂的“魔術包”發(fā)送給他們以停止暫停。
在設備進行PROFIenergy轉換期間,即緊接在開始或結束暫停命令之后,將周期性輪詢該設備的PROFIenergy狀態(tài),并更新其數(shù)據(jù)區(qū)域,直到設備終止轉換為止。
FB PE_CTRL (FB 821)
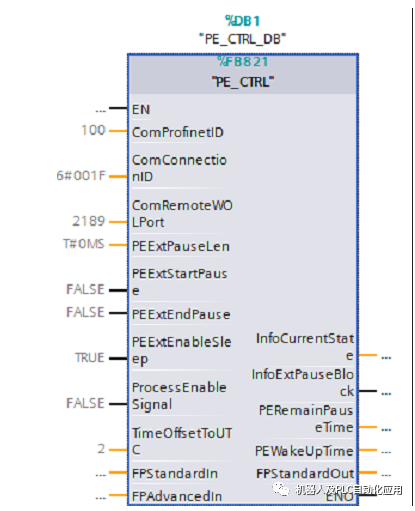
PE_CTRL集成了PE_WOL并通過其他功能對其進行了增強:
?簡化的塊參數(shù)化
?可由過程控制
?存儲計劃的暫停
?設備自動喚醒
?統(tǒng)一的可視化
此塊的功能特點:
KUKA的PROFINET Device 支持 PROFIenergy。在使用 PROFIenergy 時,機器人控制系統(tǒng)通過 PROFIenergy 協(xié)議與上一級控制系統(tǒng)通訊。
KUKA用 WorkVisual 配置 PROFINET Device
選項卡 PROFIenergy
機器人控制系統(tǒng)支持以下的 PROFIenergy 狀態(tài):
l? Ready_To_Operate:該控制器已準備就緒。
l? 驅動總線關閉:驅動裝置已關閉。
l? Hibernate :控制系統(tǒng)處于休眠狀態(tài)并且只對 WakeonLan 包有反應。
l? 制動器已制動:已制動制動器并且只對下一個運行指令有反應。
如果生產(chǎn)歇工很短,為了使用狀態(tài)驅動總線關閉,則可以用狀態(tài)制動器已制動節(jié)能。但是,只有在機器人控制系統(tǒng)處于編程停止狀態(tài)下時,才能激活狀態(tài)制動器已制動。
PROFIenergy 只能在 AUT EXT 運行模式下執(zhí)行,而不能在 T1 和 T2 運行模式下執(zhí)行。無法將 PROFIenergy 與電源管理相結合。
1狀態(tài) Ready_To_Operate
2狀態(tài)驅動總線關閉、Hibernate 或制動器已制動
PROFIenergy 狀態(tài)有以下特征:
Time_to_Pause (toff) :直到控制系統(tǒng)從狀態(tài)Ready_To_Operate達到狀態(tài)驅動總線關閉、Hibernate 或制動器已制動的時間間隔。
Time_min_length_of_stay (toff_min) :控制系統(tǒng)保持在驅動總線關閉、冬眠或制動器已制動狀態(tài)時的時間間隔。在驅動總線關閉和冬眠狀態(tài)時,所有已連接的設備在該時間間隔中應當
在重新啟動控制系統(tǒng)之前能完全關機。
Time_to_operate (ton) :直到控制系統(tǒng)從狀態(tài)驅動總線關閉、Hibernate 或制動器已制動到達狀態(tài) Ready_To_Operate 的時間間隔。
歇工時間的默認值與最小值相符。不能超過這些值。
可以通過安裝其它應用程序包提高歇工時間。建議在投入運行時測試所需的歇工時間。
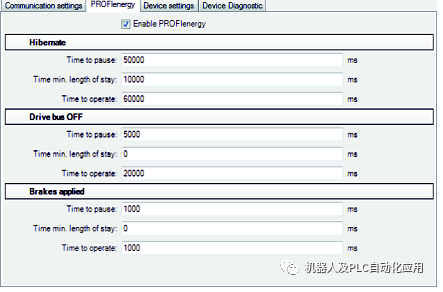
激活 PROFIenergy ? 勾選:使用 PROFIenergy。未勾選:不使用 PROFIenergy。
休眠控制:
暫停時間:輸入控制系統(tǒng)直到已達到冬眠狀態(tài)允許需要的時間。默認值:50000 ms
停留時間長度 (分鐘):輸入控制系統(tǒng)應該保持在冬眠狀態(tài)下的最小時間。默認值:10000 ms
運轉時間:輸入控制系統(tǒng)直到已達到 Ready_To_Operate 狀態(tài)允許需要的時間。默認值:60000 m
關閉驅動總線:
暫停時間:輸入控制系統(tǒng)直到已達到驅動總線關閉狀態(tài)允許需要的時間。默認值:5000 ms
停留時間長度 (分鐘):輸入控制系統(tǒng)應該保持在驅動總線關閉狀態(tài)下的最小時間。默認值:0 ms
運轉時間:輸入控制系統(tǒng)直到已達到 Ready_To_Operate 狀態(tài)允許需要的時間。默認值:20000 ms
制動制動器:
暫停時間:輸入控制系統(tǒng)直到已達到制動器已制動狀態(tài)允許需要的時間。默認值:1000 ms
停留時間長度 (分鐘):輸入控制系統(tǒng)保持在制動器已制動狀態(tài)下的最小時間。默認值:0 ms
運轉時間:輸入控制系統(tǒng)直到已達到 Ready_To_Operate 狀態(tài)允許需要的時間。默認值:1000 ms
PROFIenergy 指令
PLC 可借助 PROFIenergy 指令向機器人控制系統(tǒng)發(fā)出切換狀態(tài)或詢問信息的信號。為了能夠切換狀態(tài),機器人控制系統(tǒng)必須處于 AUT EXT 運行模式下。
KUKA支持以下 PROFIenergy 指令:
Start_Pause 機器人控制系統(tǒng)切換到驅動總線關閉狀態(tài)。
End_Pause 機器人控制系統(tǒng)重新從冬眠 / 驅動總線關閉狀態(tài)啟動。
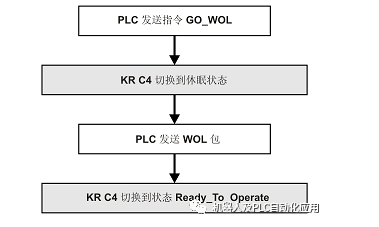
Go_WOL 將設備設置到狀態(tài) PE_sleep_mode_WOL (冬眠)中。
Info_Sleep_WOL 查明設備中有關 PE_sleep_mode_WOL 狀態(tài)的信息。
編輯:jq